
Congratulations to Nisheeth Vishnoi for his election to the 2026 Class of IEEE Fellows!
The 2026 IEEE Fellows Class acknowledges Vishnoi “for contributions to algorithms, optimization, and fairness in decision-making.”

The 2026 IEEE Fellows Class acknowledges Vishnoi “for contributions to algorithms, optimization, and fairness in decision-making.”

Andrew Kahng is part of several major national initiatives that together are transforming how future engineers learn to design and build computer chips. His work is helping UC San Diego become a driving force in the nation’s growing semiconductor innovation ecosystem.
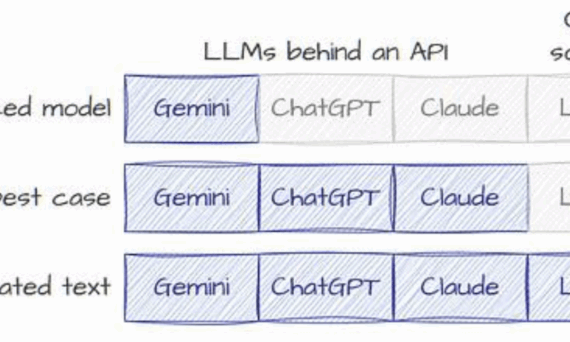
The rapid advancement of generative AI has brought remarkable innovations, from creating realistic images to generating human-like text. However, this power comes with significant responsibility. AI safety is crucial to ensure these systems are used ethically, fairly, and without unintended harm. Without proper safety measures, generative AI can spread misinformation, reinforce biases, or be exploited […]
An interview with Dr. Henrik Christensen, TILOS Robotics team co-lead and Distinguished Professor of Computer Science at UC San Diego, about the “marriage” of AI and physical automation. Christensen explains why the market’s fixation on sci-fi concepts has created a disconnect, leaving practical robotics companies poised for growth that is not yet priced in. The […]

This course covers the fundamentals of deep learning and the basics of deep neural networks, including different network architectures and optimization algorithms for training these networks, as well as applications to computer vision, robotics, and sequence modeling.
This course covers optimal control fundamentals and their application to motion planning and decision making in robotics. Topics include Markov decision processes (MDPs), dynamic programming, search-based and sampling-based motion planning, value and policy iteration, linear quadratic regulation (LQR), and model-free reinforcement learning.
This undergraduate-level course focuses on single-input single-output linear time-invariant control systems emphasizing frequency-domain methods. Topics include modeling of feedback control systems, transient and steady-state behavior, Laplace transforms, stability, root locus, frequency response, Bode plots, Nyquist plots, Nichols plots, PID control, and loop shaping.
This course is an introduction to the basic concepts of artificial intelligence (AI) as is practiced in the 2020s. At the end of this course you will be able to build AI systems that you can train to solve a variety of problems.
Graph Neural Networks (GNNs) are information processing architectures for signals supported on graphs. They have been developed and are presented in this course as generalizations of the convolutional neural networks (CNNs) that are used to process signals in time and space.
