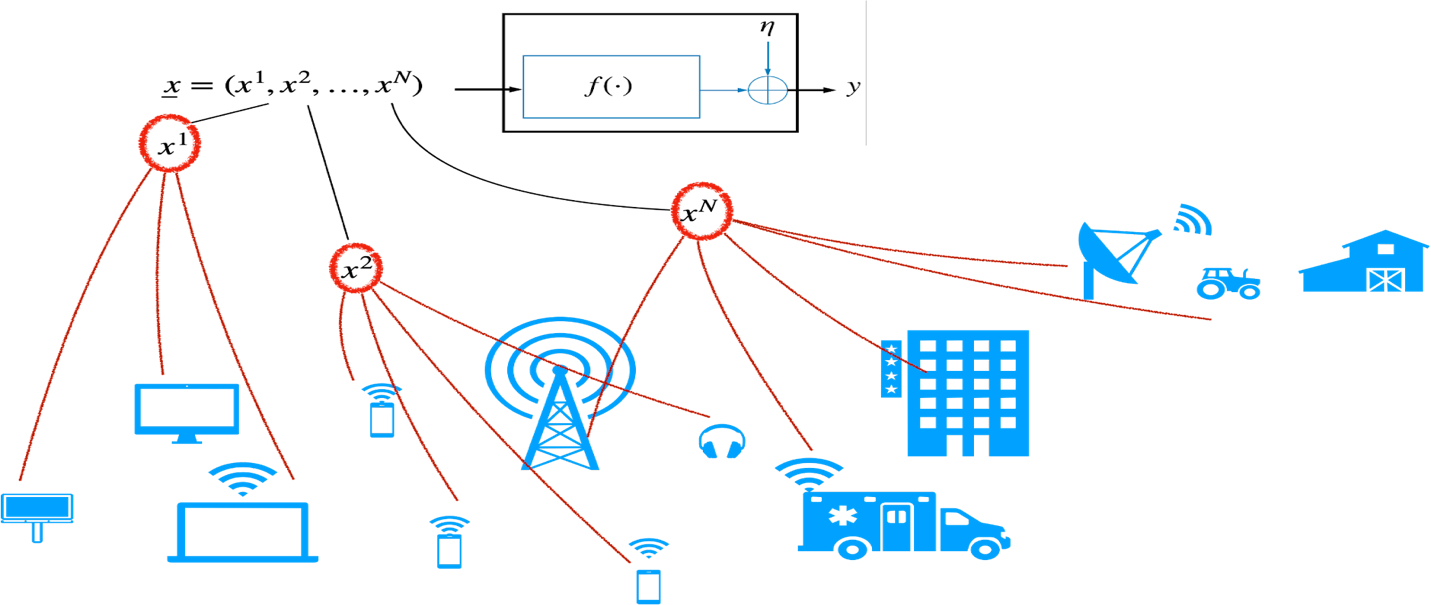
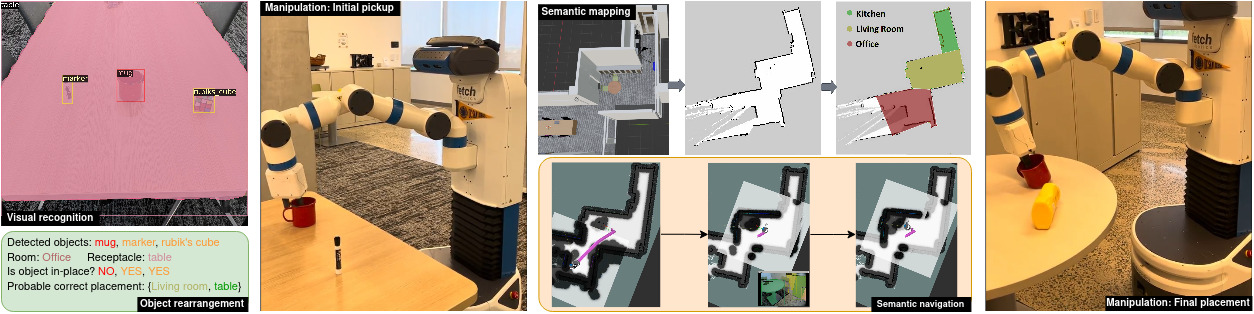
ALL TILOS RESEARCH PROJECTS AllChips-Systems DesignFoundations of AI & OptimizationCommunication Networks & SystemsCollaborative & Contextual RoboticsBetter Search Methods for Derivative-free Optimization Chips-Systems DesignCognitive Mapping for Indoor Spaces Collaborative & Contextual RoboticsCollaborative Networked Estimation and Inference through Graph Neural Networks Communication Networks & SystemsData-driven Adaptive Network Models: Quantitative Group TestingCommunication Networks & SystemsDeep Learning with SymmetriesFoundations of AI & OptimizationDifferentiable Extensions with Rounding Guarantees for Combinatorial Optimization over Permutations and TreesFoundations of AI & OptimizationDynamic Decisions Under Uncertainty Foundations of AI & OptimizationEfficient Reinforcement Learning for Robotic Control Collaborative & Contextual RoboticsEmpirical Network Optimization via Distributed Zeroth-order OptimizationCommunication Networks & SystemsEmpirical Network Optimization via Non-uniform Sampling Communication Networks & SystemsExtrapolationFoundations of AI & OptimizationFedCE: Federated Certainty Equivalence Control for Linear Gaussian Systems Foundations of AI & OptimizationGraph Representation LearningFoundations of AI & OptimizationHousehold Navigation and Manipulation for Everyday Object Rearrangement Tasks Collaborative & Contextual RoboticsInterior Search for Nonlinear SMT and Application in VerificationChips-Systems Design